Publications
A list of my publications in reverse chronological order.
2026
- Journal
 BiPneu: Design and Control of a Bipolar-Pressure Pneumatic System for Soft RobotsYu Mei, Xinyu Zhou, Vedant Naik, Alan Gao, and Xiaobo TanIEEE/ASME Transactions on Mechatronics, to appear, 2026
BiPneu: Design and Control of a Bipolar-Pressure Pneumatic System for Soft RobotsYu Mei, Xinyu Zhou, Vedant Naik, Alan Gao, and Xiaobo TanIEEE/ASME Transactions on Mechatronics, to appear, 2026Positive-negative pressure regulation is critical to soft robotic actuators, enabling large motion ranges and versatile actuation modes. However, achieving high-performance regulation across both pressure polarities remains challenging due to asymmetric inflation–deflation dynamics, valve nonlinearities, and switching-induced flow disturbances. This paper presents BiPneu, a compact and cost-efficient multi-channel bipolar-pressure pneumatic system for soft robots that enables wide-range, accurate, and responsive pressure regulation while providing seamless compatibility with high-level software ecosystems. A dual-mode sliding-mode controller (DM-SMC) with hysteresis-supervised mode selection is proposed based on a hybrid electro-pneumatic model. Extensive simulation and experiments demonstrate the superior performance of DM-SMC in tracking step and sinusoidal pressure references compared with both advanced model predictive controllers and well-tuned PID controllers. Experimental results show average absolute errors of 1.44 kPa in multi-step tests and 4.23 kPa in sinusoidal tracking, corresponding to reductions of 11.9% and 35.6% relative to PID control, along with improved control effort, valve switching rate, and transient response. Robustness of DM-SMC is further verified on a bellow actuator with pressure-dependent volume. Finally, BiPneu’s capability is demonstrated via two soft robotic examples, quick ball-maneuvering with a soft parallel manipulator and real-time finite element method (FEM)-based teleoperation of a soft bellows actuator.
2025
- Conference
 Learning-Based Modeling of Soft Actuators Using Euler Spiral-Inspired CurvatureYu Mei, Shangyuan Yuan, Xinda Qi, Preston Fairchild, and Xiaobo TanIn The Modeling, Estimation and Control Conference (MECC), 2025 - Best Student Paper Finalist
Learning-Based Modeling of Soft Actuators Using Euler Spiral-Inspired CurvatureYu Mei, Shangyuan Yuan, Xinda Qi, Preston Fairchild, and Xiaobo TanIn The Modeling, Estimation and Control Conference (MECC), 2025 - Best Student Paper Finalist
Best Student Paper Finalist
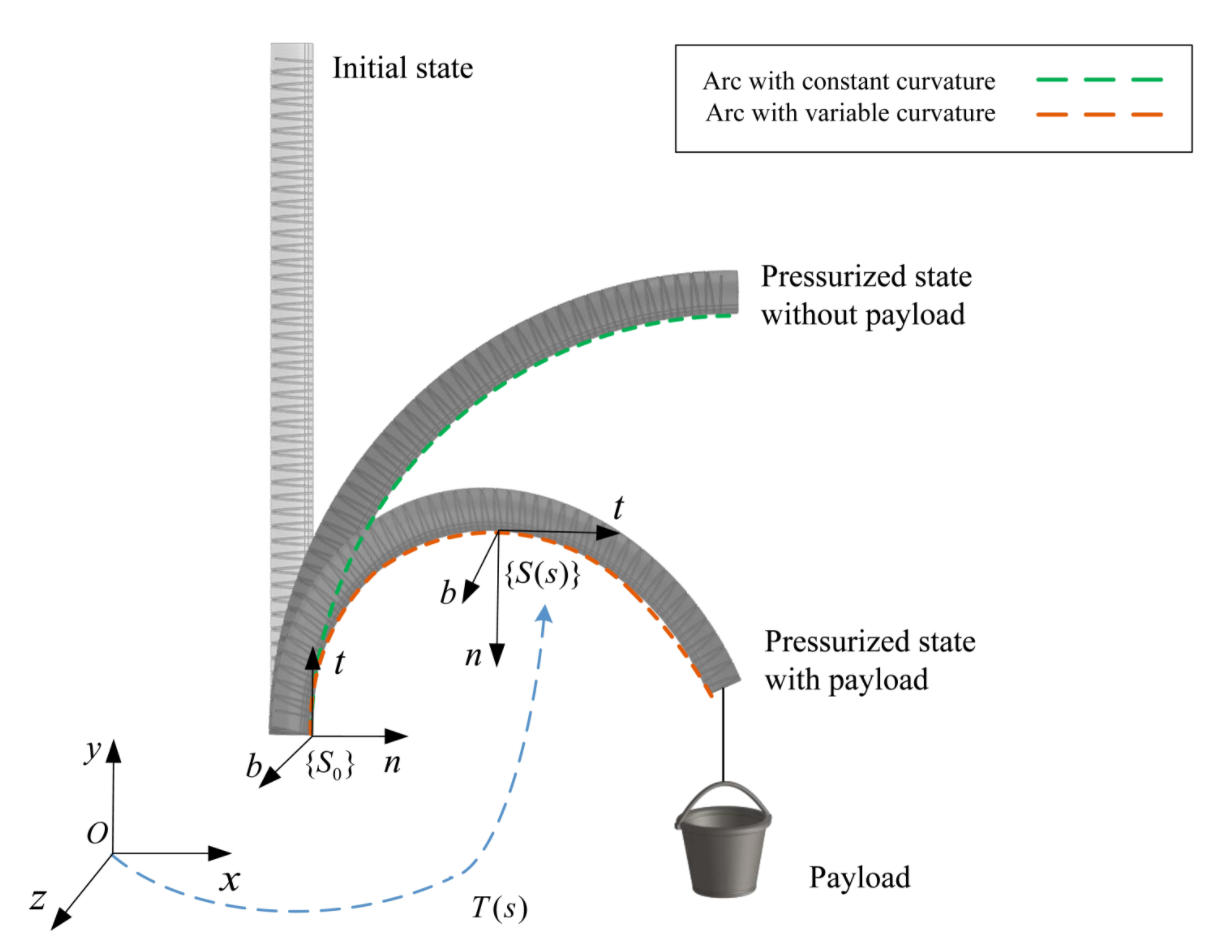
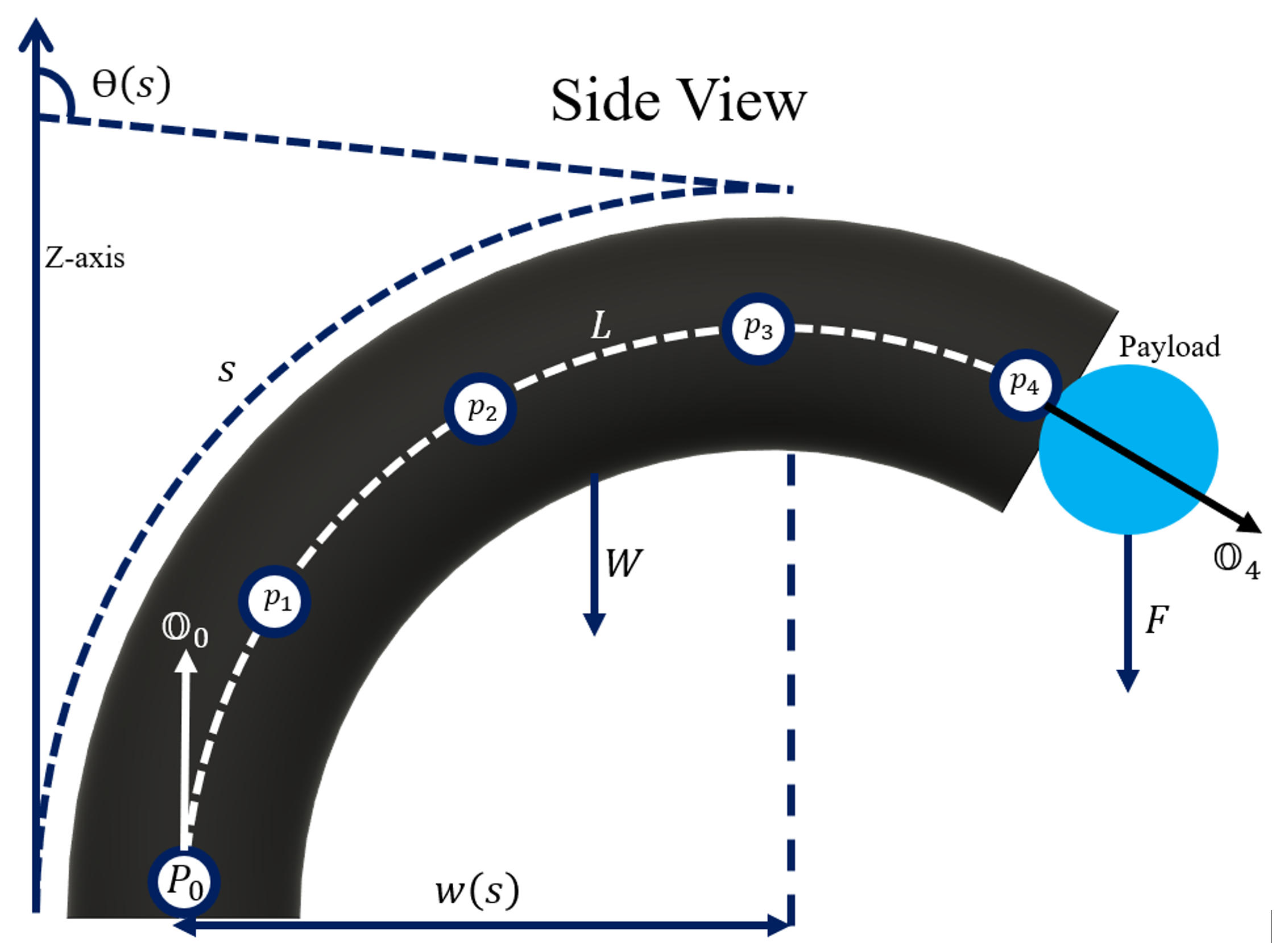
Soft robots, distinguished by their inherent compliance and continuum structures, present unique modeling challenges, especially when subjected to significant external loads such as gravity and payloads. In this study, we introduce an innovative data-driven modeling framework leveraging an Euler spiral-inspired shape representations to accurately describe the complex shapes of soft continuum actuators. Based on this representation, we develop neural network-based forward and inverse models to effectively capture the nonlinear behavior of a fiber-reinforced pneumatic bending actuator. Our forward model accurately predicts the actuator’s deformation given inputs of pressure and payload, while the inverse model reliably estimates payloads from observed actuator shapes and known pressure inputs. Comprehensive experimental validation demonstrates the effectiveness and accuracy of our proposed approach. Notably, the augmented Euler spiral-based forward model achieves low average positional prediction errors of 3.38%, 2.19%, and 1.93% of the actuator length at the one-third, two-thirds, and tip positions, respectively. Furthermore, the inverse model demonstrates precision of estimating payloads with an average error as low as 0.72% across the tested range. These results underscore the potential of our method to significantly enhance the accuracy and predictive capabilities of modeling frameworks for soft robotic systems.
- Conference
 Fast Online Adaptive Neural MPC via Meta-LearningYu Mei, Xinyu Zhou, Shuyang Yu, Vaibhav Srivastava, and Xiaobo TanIn The Modeling, Estimation and Control Conference (MECC), 2025
Fast Online Adaptive Neural MPC via Meta-LearningYu Mei, Xinyu Zhou, Shuyang Yu, Vaibhav Srivastava, and Xiaobo TanIn The Modeling, Estimation and Control Conference (MECC), 2025Data-driven model predictive control (MPC) has shown strong potential for improving control performance under model uncertainties. However, many existing approaches rely on extensive offline data collection and computationally expensive training, which limits their ability to adapt online. This paper presents a fast online adaptive MPC framework that integrates neural networks with Model-Agnostic Meta-Learning (MAML) to enable few-shot adaptation of residual dynamics. By capturing discrepancies between nominal and true system behavior using minimal online data and gradient steps, the proposed method achieves rapid model correction. The meta-learned residual models are embedded into a computationally efficient L4CasADi-based MPC pipeline, improving prediction accuracy and real-time control performance. Simulation studies on a cart-pole system and a 2D quadrotor demonstrate significant gains in adaptation speed and accuracy compared to nominal MPC and nominal MPC augmented with a freshly initialized neural network.
- Conference
 Modeling and Mixed-Integer Nonlinear MPC of Positive-Negative Pressure Pneumatic SystemsYu Mei, Xinyu Zhou, and Xiaobo TanPreprint, 2025
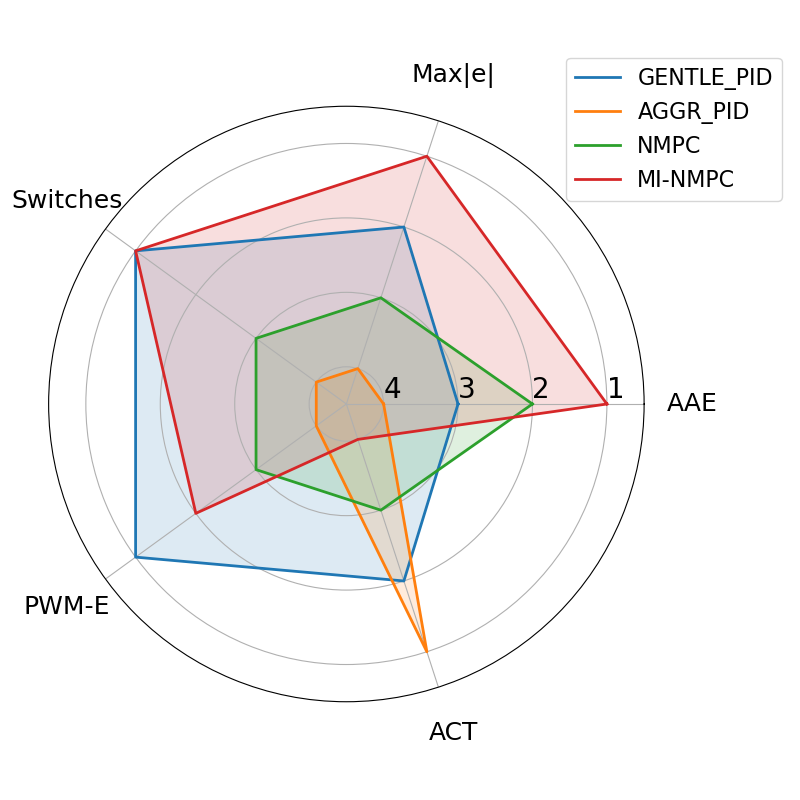
Modeling and Mixed-Integer Nonlinear MPC of Positive-Negative Pressure Pneumatic SystemsYu Mei, Xinyu Zhou, and Xiaobo TanPreprint, 2025Positive-negative pressure regulation is critical to soft robotic actuators, enabling large motion ranges and versatile actuation modes. However, it remains challenging due to complex nonlinearities, oscillations, and direction-dependent, piecewise dynamics introduced by affordable pneumatic valves and the bidirectional architecture. We present a model-based control framework that couples a physics-grounded switched nonlinear plant model (inflation/deflation modes) with a mixed-integer nonlinear model predictive controller (MI-NMPC). The controller co-optimizes mode scheduling and PWM inputs to realize accurate reference tracking while enforcing input constraints and penalizing energy consumption and excessive switching. To make discrete mode decisions tractable, we employ a Combinatorial Integral Approximation that relaxes binary mode variables to continuous surrogates within the valve-scheduling layer. With parameters identified from the physical system, simulations with step and sinusoidal references validate the proposed MI-NMPC, showing a consistently favorable trade-off among accuracy, control effort, and switching, and outperforming conventional PID and NMPC with heuristic mode selection.
- Journal
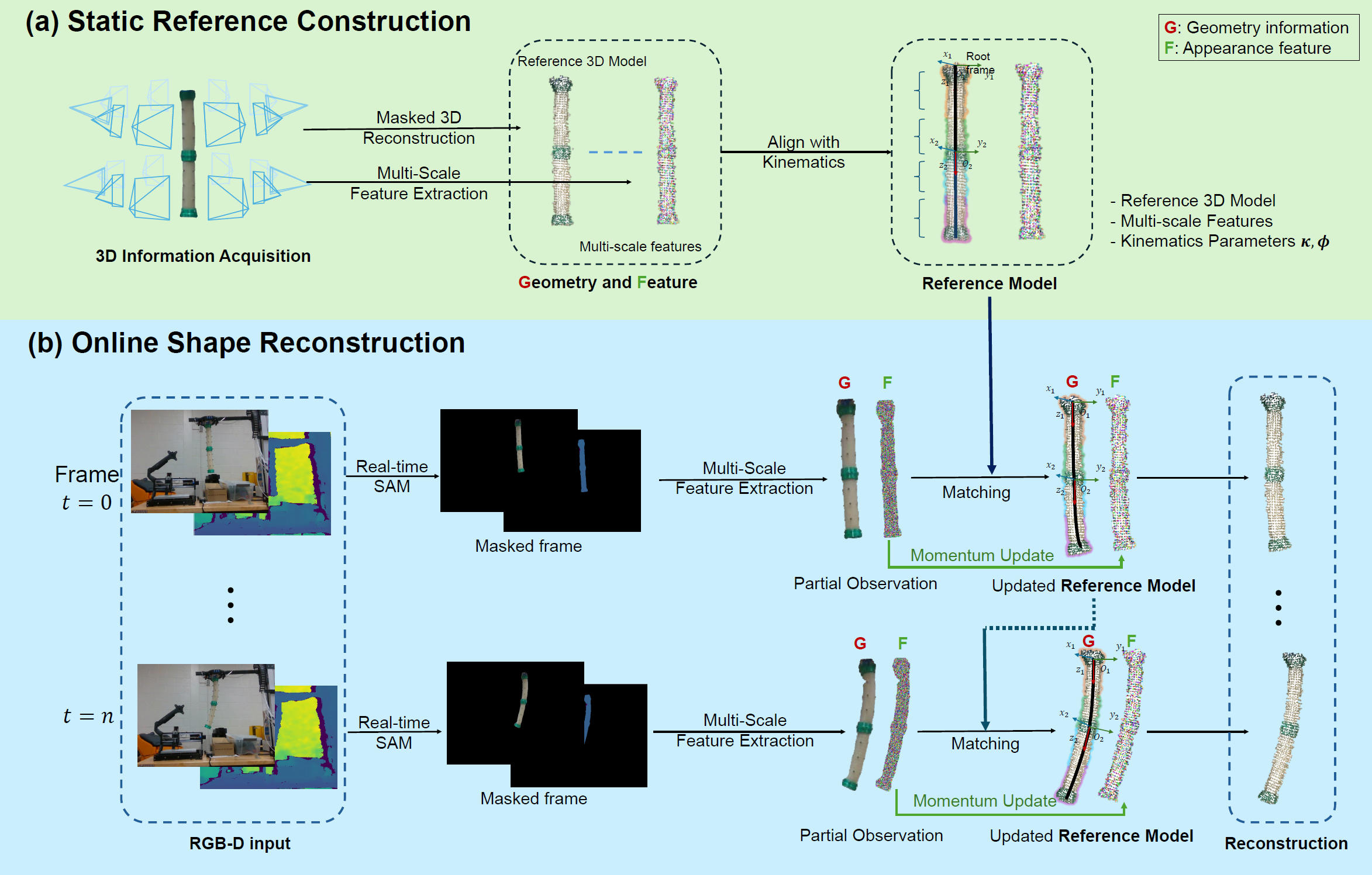 AFT: Appearance-Based Feature Tracking for Markerless and Training-Free Shape Reconstruction of Soft RobotsShangyuan Yuan, Preston Fairchild, Yu Mei, Xinyu Zhou, and Xiaobo TanIEEE Robotics and Automation Letters, 2025
AFT: Appearance-Based Feature Tracking for Markerless and Training-Free Shape Reconstruction of Soft RobotsShangyuan Yuan, Preston Fairchild, Yu Mei, Xinyu Zhou, and Xiaobo TanIEEE Robotics and Automation Letters, 2025Accurate shape reconstruction is essential for precise control and reliable operation of soft robots. Compared to sensor-based approaches, vision-based methods offer advantages in cost, simplicity, and ease of deployment. However, existing vision-based methods often rely on complex camera setups, specific backgrounds, or large-scale training datasets, limiting their practicality in real-world scenarios. In this work, we propose a vision-based, markerless, and training-free framework for soft robotic shape reconstruction that directly leverages the natural surface appearance of the robot. These surface features act as implicit visual markers, enabling a hierarchical matching strategy that decouples local partition alignment from global kinematic optimization. Requiring only an initial 3D reconstruction and kinematic alignment, our method achieves real-time shape tracking across diverse environments while maintaining robustness to occlusions and variations in camera viewpoints. Experimental validation on a continuum soft robot demonstrates an average tip error of 2.6% during real-time operation, as well as stable performance in practical closed-loop control tasks. These results highlight the potential of the proposed approach for reliable, low-cost deployment in dynamic real-world settings.
- Journal
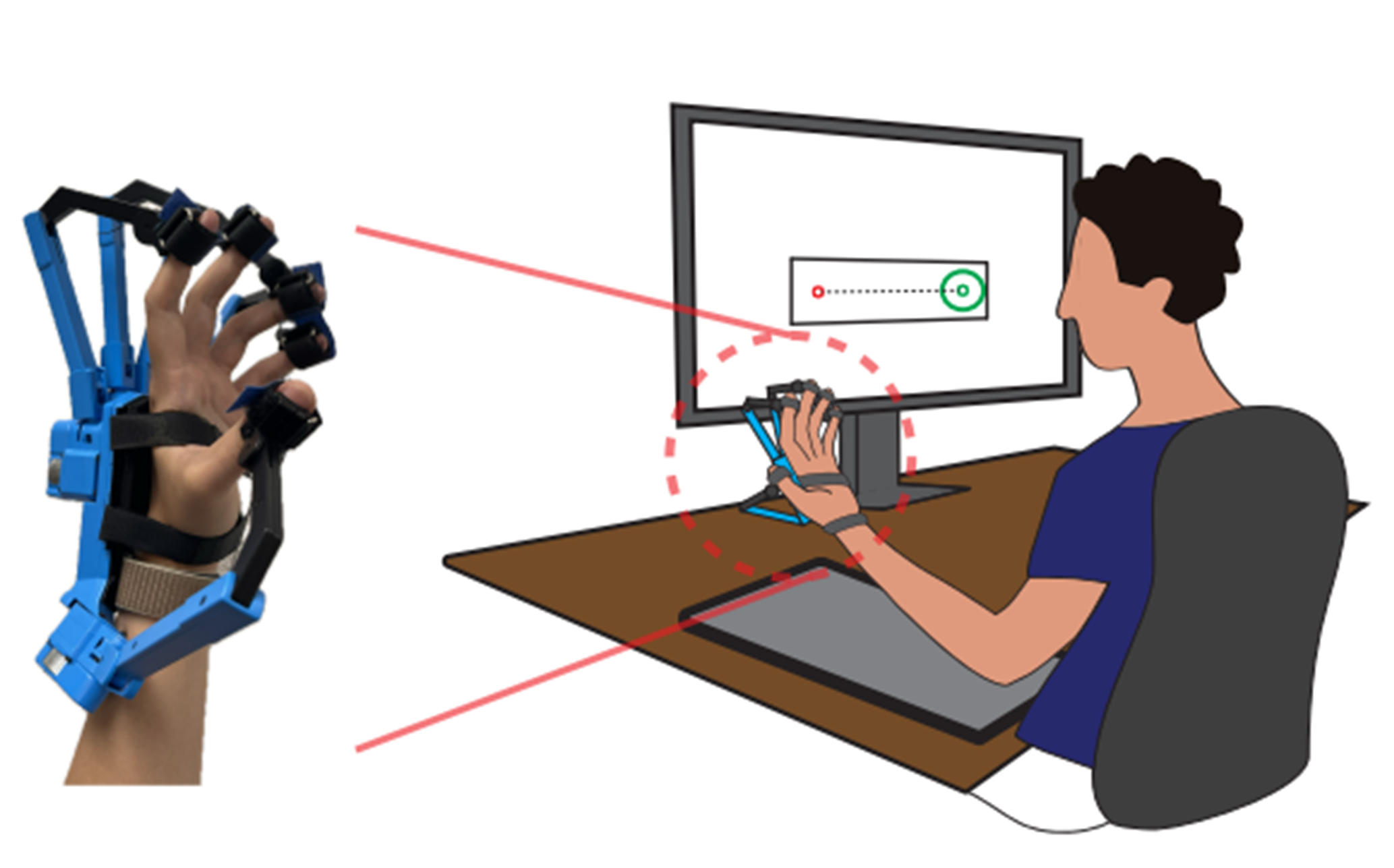 Error compensation in a redundant system during ’failure’ of individual motor elementsNarae Shin, Yu Mei, Xiaobo Tan, Vaibhav Srivastava, and Rajiv RanganathanExperimental Brain Research, 2025
Error compensation in a redundant system during ’failure’ of individual motor elementsNarae Shin, Yu Mei, Xiaobo Tan, Vaibhav Srivastava, and Rajiv RanganathanExperimental Brain Research, 2025A characteristic feature of redundancy in the motor system is the ability to compensate for the failure of individual motor elements without affecting task performance. In this study, we examined the pattern and variability in error compensation between motor elements during a virtual task. Participants performed a redundant cursor control task with finger movements. In some conditions, we induced ‘failure’ by using a haptic glove to apply forces to constrain the motion of one of four fingers (index, middle, ring, or little). Our results showed that (i) other fingers increased their range of motion to compensate for the failure of a specific finger, with most of this compensation coming from non-adjacent fingers, and (ii) there was greater trial-to-trial variation in how the task was achieved as indexed by the higher null space variability when the middle and ring fingers were constrained. These results highlight the key role of the interdependence between motor elements in determining error compensation patterns and the variability in coordination patterns.
2024
- Journal
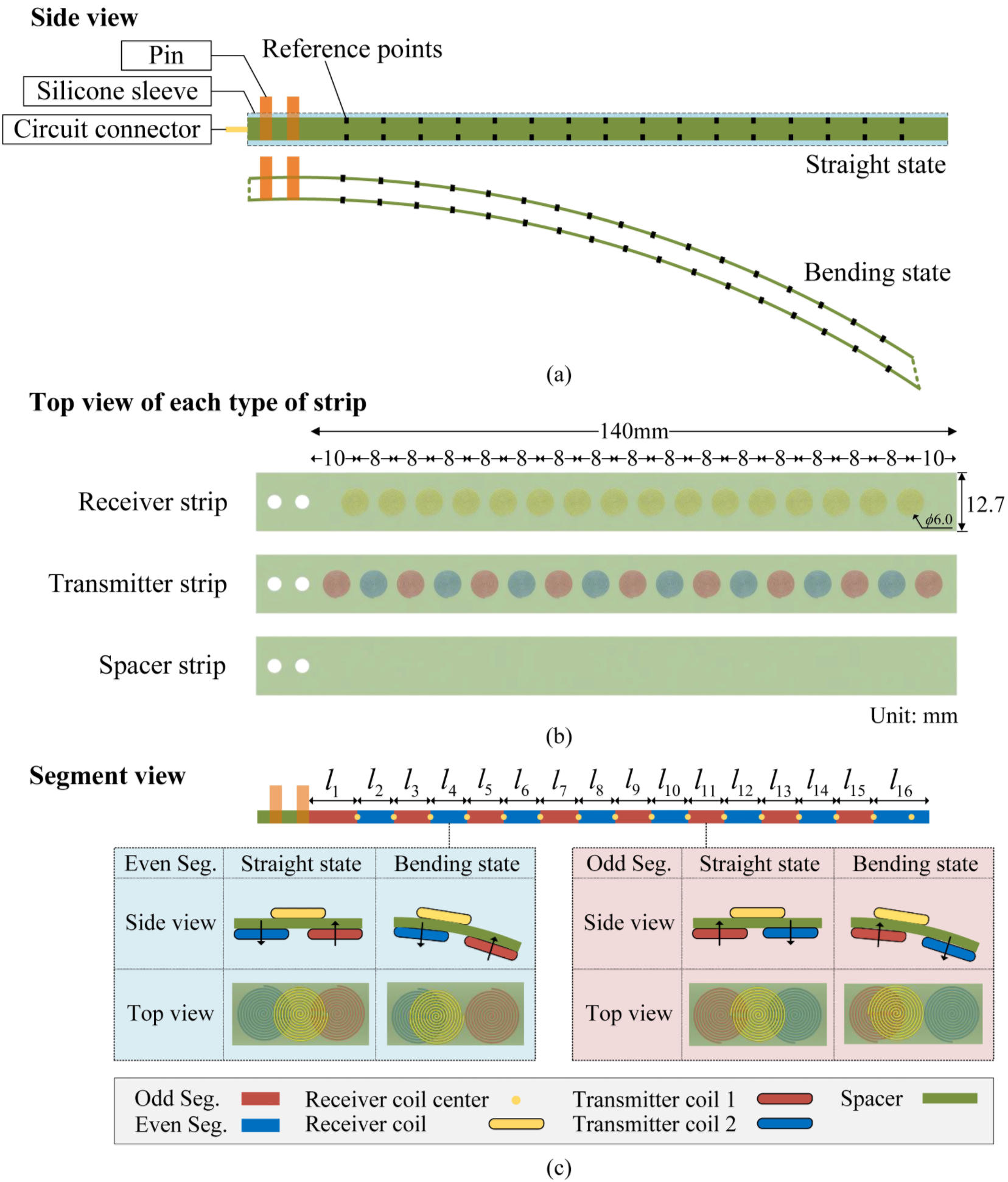 Simultaneous Shape Reconstruction and Force Estimation of Soft Bending Actuators Using Distributed Inductive Curvature SensorsYu Mei, Lei Peng, Hongyang Shi, Xinda Qi, Yiming Deng, and 2 more authorsIEEE/ASME Transactions on Mechatronics, 2024 - Best Student Paper at AIM2024
Simultaneous Shape Reconstruction and Force Estimation of Soft Bending Actuators Using Distributed Inductive Curvature SensorsYu Mei, Lei Peng, Hongyang Shi, Xinda Qi, Yiming Deng, and 2 more authorsIEEE/ASME Transactions on Mechatronics, 2024 - Best Student Paper at AIM2024 Best Student Paper at AIM2024
Soft robots, with their remarkable advantages in various applications, face the critical challenge of embodied perception, encompassing proprioceptive sensing and perceiving unknown environments (exteroception). In this article, we achieve simultaneous continuous shape reconstruction and external force estimation for soft bending actuators using only a proprioceptive curvature sensor. We introduce a novel distributed inductive curvature sensor designed for capturing continuous shape through electromagnetic induction. In addition, we enhance an analytical static model based on the Euler–Bernoulli curved beam theory to predict the shape under pneumatic actuation and external forces. Furthermore, a model-based optimization algorithm is proposed to estimate external forces based on the measured shape. Extensive experimental validation supports the efficacy of the proposed sensor and algorithms.
- Journal
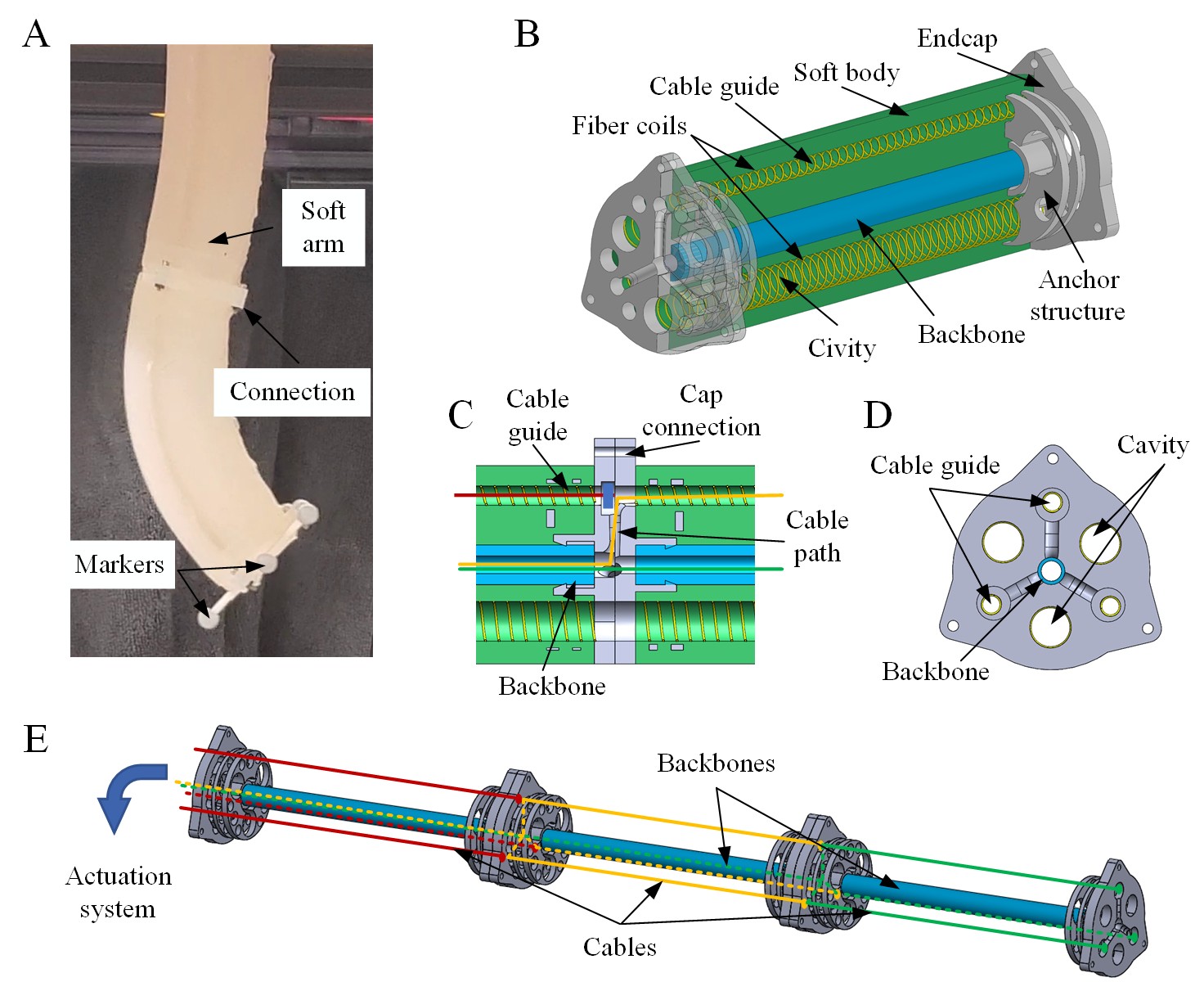 Design and Nonlinear Modeling of a Modular Cable-Driven Soft Robotic ArmXinda Qi, Yu Mei, Dong Chen, Zhaojian Li, and Xiaobo TanIEEE/ASME Transactions on Mechatronics, 2024
Design and Nonlinear Modeling of a Modular Cable-Driven Soft Robotic ArmXinda Qi, Yu Mei, Dong Chen, Zhaojian Li, and Xiaobo TanIEEE/ASME Transactions on Mechatronics, 2024We propose a novel multisection cable-driven soft robotic arm inspired by octopus tentacles along with a new modeling approach. Each section of the modular manipulator is made of a soft tubing backbone, a soft silicone arm body, and two rigid endcaps, which connect adjacent sections and decouple the actuation cables of different sections. The soft robotic arm is made with casting after the rigid endcaps are 3D-printed, achieving low-cost and convenient fabrication. To capture the nonlinear effect of cables pushing into the soft silicone arm body, which results from the absence of intermediate rigid cable guides for higher compliance, an analytical static model is developed to describe the relationship between the bending curvature and the cable lengths. The proposed model shows superior prediction performance in experiments over that of a baseline model, especially under large bending conditions. Based on the nonlinear static model, a kinematic model of a multisection arm is further developed and used to derive a motion planning algorithm. Experiments show that the proposed soft arm has high flexibility and a large workspace, and the tracking errors under the algorithm based on the proposed modeling approach are up to 52% smaller than those with the algorithm derived from the baseline model.
- Journal
 Mechanical Design and Data-Enabled Predictive Control of a Planar Soft RobotHuanqing Wang, Kaixiang Zhang, Kyungjoon Lee, Yu Mei, Keyi Zhu, and 3 more authorsIEEE Robotics and Automation Letters, 2024
Mechanical Design and Data-Enabled Predictive Control of a Planar Soft RobotHuanqing Wang, Kaixiang Zhang, Kyungjoon Lee, Yu Mei, Keyi Zhu, and 3 more authorsIEEE Robotics and Automation Letters, 2024Soft robots offer a unique combination of flexibility, adaptability, and safety, making them well-suited for a diverse range of applications. However, the inherent complexity of soft robots poses great challenges in their modeling and control. In this letter, we present the mechanical design and data-driven control of a pneumatic-driven soft planar robot. Specifically, we employ a data-enabled predictive control (DeePC) strategy that directly utilizes system input/output data to achieve safe and optimal control, eliminating the need for tedious system identification or modeling. In addition, a dimension reduction technique is introduced into the DeePC framework, resulting in significantly enhanced computational efficiency with minimal to no degradation in control performance. Comparative experiments are conducted to validate the efficacy of DeePC in the control of the fabricated soft robot.
2023
- Conference
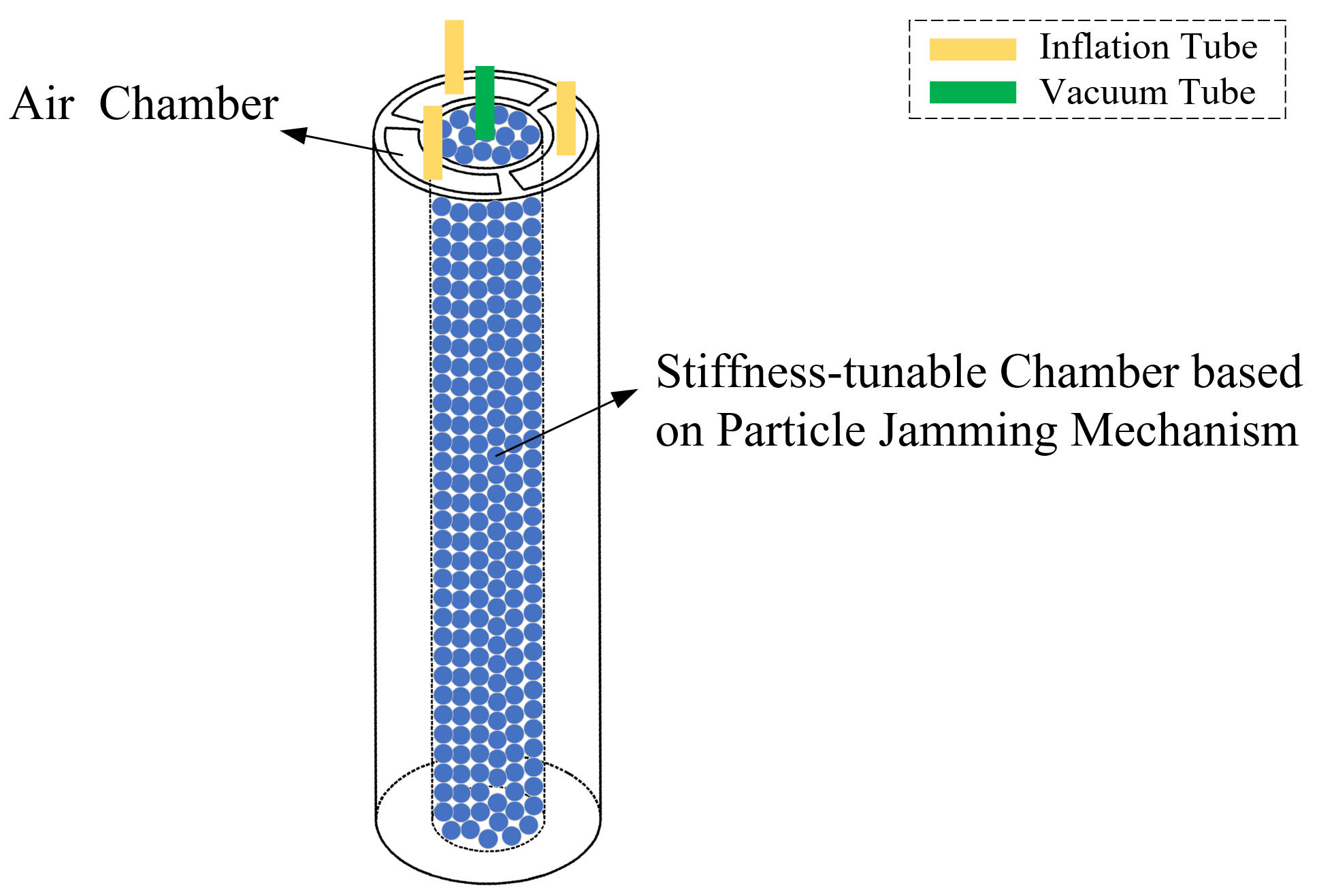
 Simultaneous Motion and Stiffness Control for Soft Pneumatic Manipulators Based on a Lagrangian-Based Dynamic ModelYu Mei, Preston Fairchild, Vaibhav Srivastava, Changyong Cao, and Xiaobo TanIn American Control Conference (ACC), 2023
Simultaneous Motion and Stiffness Control for Soft Pneumatic Manipulators Based on a Lagrangian-Based Dynamic ModelYu Mei, Preston Fairchild, Vaibhav Srivastava, Changyong Cao, and Xiaobo TanIn American Control Conference (ACC), 2023A soft continuum manipulator with tunable stiffness can not only take advantage of high compliance for safe adaptation in unknown environments, but also circumvent the drawbacks of instability and low loading capability. The high nonlinearity of soft manipulators and the strong coupling between actuation and stiffness-tuning make their simultaneous control challenging. In this work, a novel approach to simultaneous control of actuation and stiffness-tuning is proposed for soft pneumatic manipulators. With a piecewise-constant curvature assumption, a Lagrangian-based dynamic model with realistic approximation is used for control design, where the dynamics of the stiffness-tunable mechanism is incorporated. An extended Kalman filter (EKF) is proposed to estimate unmeasurable states including the stiffness and the velocity. A nonlinear model predictive control (NMPC) framework is developed first in the configuration space, and then extended to the task space, for simultaneous motion and stiffness control under inflation and vacuum pressure constraints. Simulation results are presented to support the efficacy of the proposed approach.
- Journal
 Automated Soft Pressure Sensor Array-Based Sea Lamprey Detection Using Machine LearningHongyang Shi, Yu Mei, Ian González-Afanador, Claudia Chen, Scott Miehls, and 3 more authorsIEEE Sensors Journal, 2023
Automated Soft Pressure Sensor Array-Based Sea Lamprey Detection Using Machine LearningHongyang Shi, Yu Mei, Ian González-Afanador, Claudia Chen, Scott Miehls, and 3 more authorsIEEE Sensors Journal, 2023Sea lamprey, a destructive invasive species in the Great Lakes in North America, is among very few fishes that rely on oral suction during migration and spawning. Recently, soft pressure sensors have been proposed to detect the attachment of sea lamprey as part of the monitoring and control effort. However, human decision is still required for the recognition of patterns in the measured signals. In this article, a novel automated soft pressure sensor array-based sea lamprey detection framework is proposed using object detection convolutional neural networks. First, the resistance measurements of the pressure sensor array are converted to mappings of relative change in resistance. These mappings typically show two different types of patterns under lamprey attachment: a high-pressure circular pattern corresponding to the mouth rim compressed against the sensor (“compression” pattern), and a low-pressure blob corresponding to the partial vacuum region of the sucking mouth (“suction” pattern). Three types of object detection algorithms, single-shot detector (SSD), RetinaNet, and YOLOv5s, are applied to the dataset of measurements collected in the presence of sea lamprey attachment, and the comparison of their performance shows that YOLOv5s model achieves the highest mean average precision (mAP) and the fastest inference speed. Furthermore, to improve the accuracy of the prediction model and reduce the false positive (FP) rate due to the sensor’s memory effect, a filter branch with different detection thresholds for the compression and suction patterns, respectively, is added to the original machine-learning algorithm. The trained model is validated and used to automatically detect sea lamprey attachments and locate the suction area on the sensor in real time.
- Journal
 Physics-informed Online Estimation of Stiffness and Shape of Soft Robotic ManipulatorsPreston Fairchild, Yu Mei, and Xiaobo TanIEEE Control Systems Letters, 2023
Physics-informed Online Estimation of Stiffness and Shape of Soft Robotic ManipulatorsPreston Fairchild, Yu Mei, and Xiaobo TanIEEE Control Systems Letters, 2023Soft robots are designed to be highly compliant to reduce the risk of injury or damage to humans and the environment. This compliance can lead to large deformations when handling payloads, significantly altering the operation of the robot. The stiffness of a soft robot, actively tuned or passively influenced by inputs (e.g., pneumatic pressures), is an important state variable, yet difficult to measure directly for the control of a soft robot. In this letter we propose a novel physics-informed approach to online estimation of the stiffness and shape of a soft manipulator under a payload, based on measurements that are readily available (e.g., positions of five points on the manipulator, or the position and orientation of the tip). The same approach is also adapted for estimating the payload when the stiffness is known. The proposed method is illustrated and supported with experimental results on a soft pneumatic actuator. In particular, it is shown to produce more accurate shape estimate than a commonly adopted piecewise constant curvature (PCC) model (which cannot produce a stiffness estimate), with an average error 57% smaller than the PCC method. The stiffness values estimated are also shown to be consistent and fall within the expected physical range.
- Journal
 Semi-physical Modeling of Soft Pneumatic Actuators with Stiffness TuningPreston Fairchild, Noah Shephard, Yu Mei, and Xiaobo TanASME Letters in Dynamic Systems and Control, 2023
Semi-physical Modeling of Soft Pneumatic Actuators with Stiffness TuningPreston Fairchild, Noah Shephard, Yu Mei, and Xiaobo TanASME Letters in Dynamic Systems and Control, 2023The inherent low stiffness in soft robots makes them preferable for working in close proximity to humans. However, having this low stiffness creates challenges when operating in terms of control and sensitivity to disturbances. To alleviate this issue, soft robots often have built-in stiffness tuning mechanisms that allow for controlled increases in stiffness. Additionally, redundant pneumatic manipulators can utilize antagonistic pressure to achieve identical positions under increased stiffness. In this paper, we develop a model to predict the stiffness and configuration of a pneumatic soft manipulator under different pressure inputs and external forces. The model is developed based on the physical characteristics of a soft manipulator while enabling efficient parameter estimation and computation. The efficacy of the modeling approach is supported via experimental results.