1Demo
GP-MPC tracking on the Isaac Sim soft-arm simulation.
2Overview
The soft robotic arm is controlled with a Gaussian Process-based Model Predictive Control method. The GP model is used to capture the nonlinear soft-arm dynamics, while MPC optimizes the control inputs to track the desired motion in real time.
This simulation shows how Isaac Sim FEM can be combined with learning-based predictive control for soft robotic arm modeling, simulation, and control.
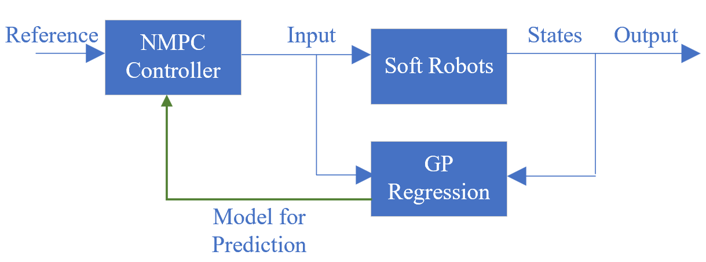
GP-MPC architecture: a Gaussian-Process dynamics model inside the real-time MPC loop.
TECHNICAL SKILLS: Isaac Sim