Yu Mei

meiyu1 (at) msu (dot) edu
Michigan State University
East Lansing, MI, 48823, USA
I am a PhD student in the Smart Microsystems Lab at Michigan State University, advised by Prof. Xiaobo Tan starting from 2021. Prior to joining MSU, I received my Bachelor degree in Robotics Engineering from the Department of Automation at Southeast University in 2020, advised by Prof. Aiguo Song.
My research focuses on soft robotics, control systems and mechatronics, with an emphasis on soft actuator and sensor system design, as well as data-driven and learning-based modeling and control of robotic systems.
I was recognized as an ASME Dynamic Systems and Control Division (DSCD) Rising Star in 2025. My work received the DSCD Best Mechatronics Paper Award in 2025, the Best Student Paper Award at the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) in 2024, and the Best Student Paper Finalist at the Modeling, Estimation and Control Conference (MECC) in 2025.
| May. 2026 | |
|---|---|
| May. 2026 | |
| Oct. 2025 | |
| Oct. 2025 | |
| Jul. 2025 | |
| Aug. 2024 | |
| May. 2024 | |
| Jan. 2023 | |
| Aug. 2021 | I joined the Smart Microsystems Lab at Michigan State University with the Engineering Distinguished Scholar Fellowship. |
| Oct. 2020 | I joined the Department of Automation at Southeast University as a Research Assistant, mentored by Dr. Changyin Sun. |
| Jun. 2020 | I graduated from Southeast University (B.Eng.) with the Outstanding Graduate honor. |
- Journal
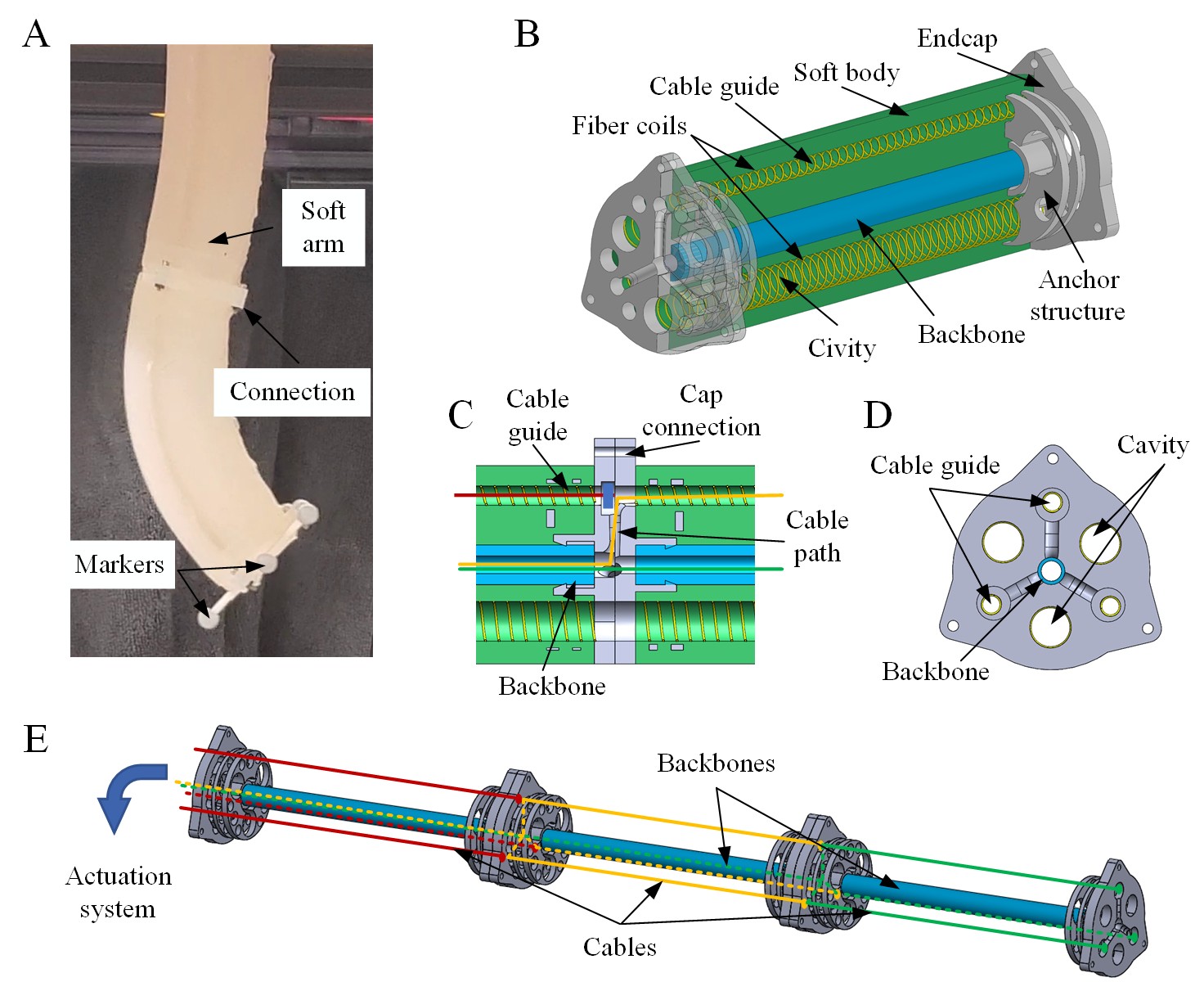
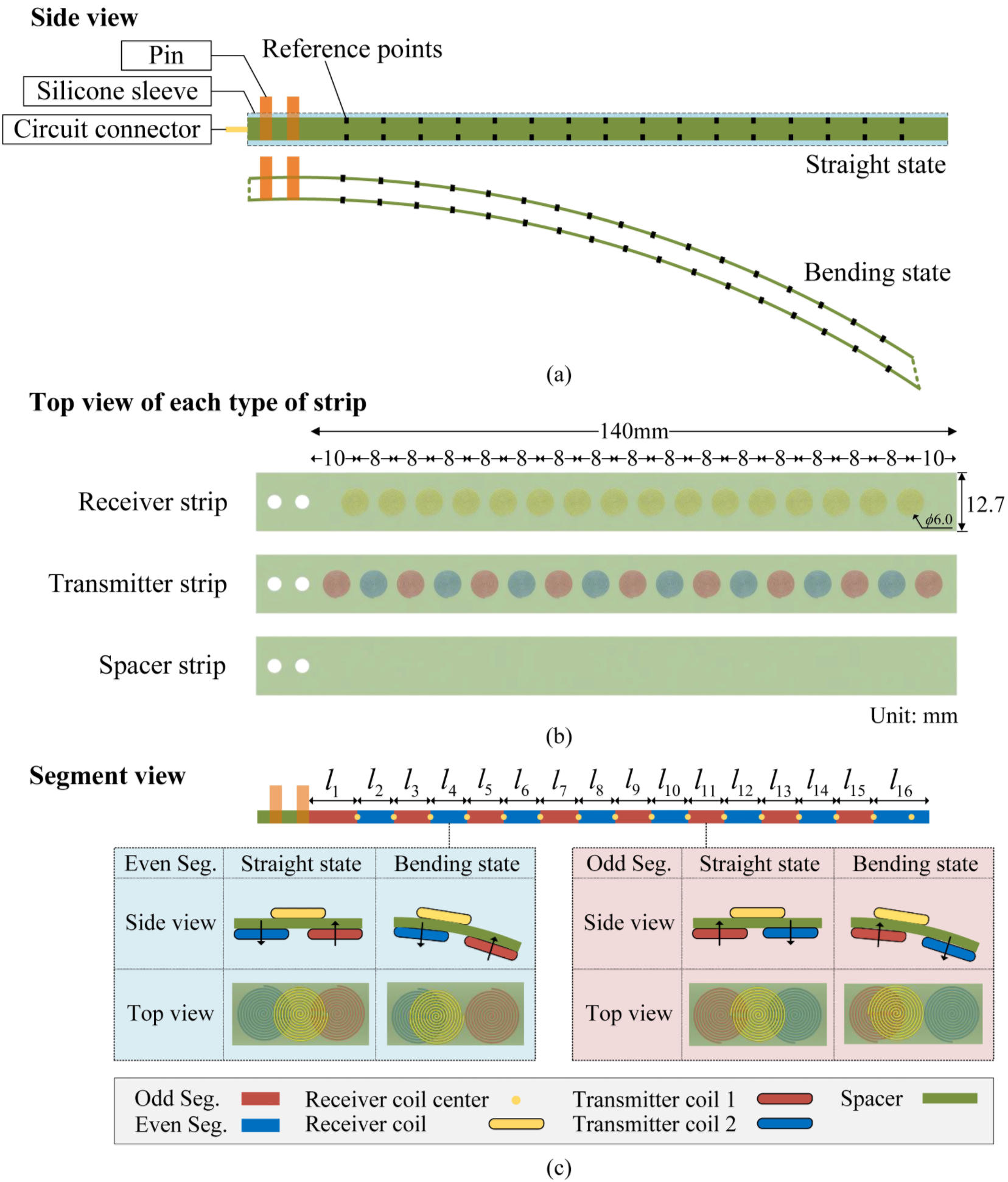 Simultaneous Shape Reconstruction and Force Estimation of Soft Bending Actuators Using Distributed Inductive Curvature SensorsIEEE/ASME Transactions on Mechatronics (IF=7.3), 2024
Simultaneous Shape Reconstruction and Force Estimation of Soft Bending Actuators Using Distributed Inductive Curvature SensorsIEEE/ASME Transactions on Mechatronics (IF=7.3), 2024 - Conference
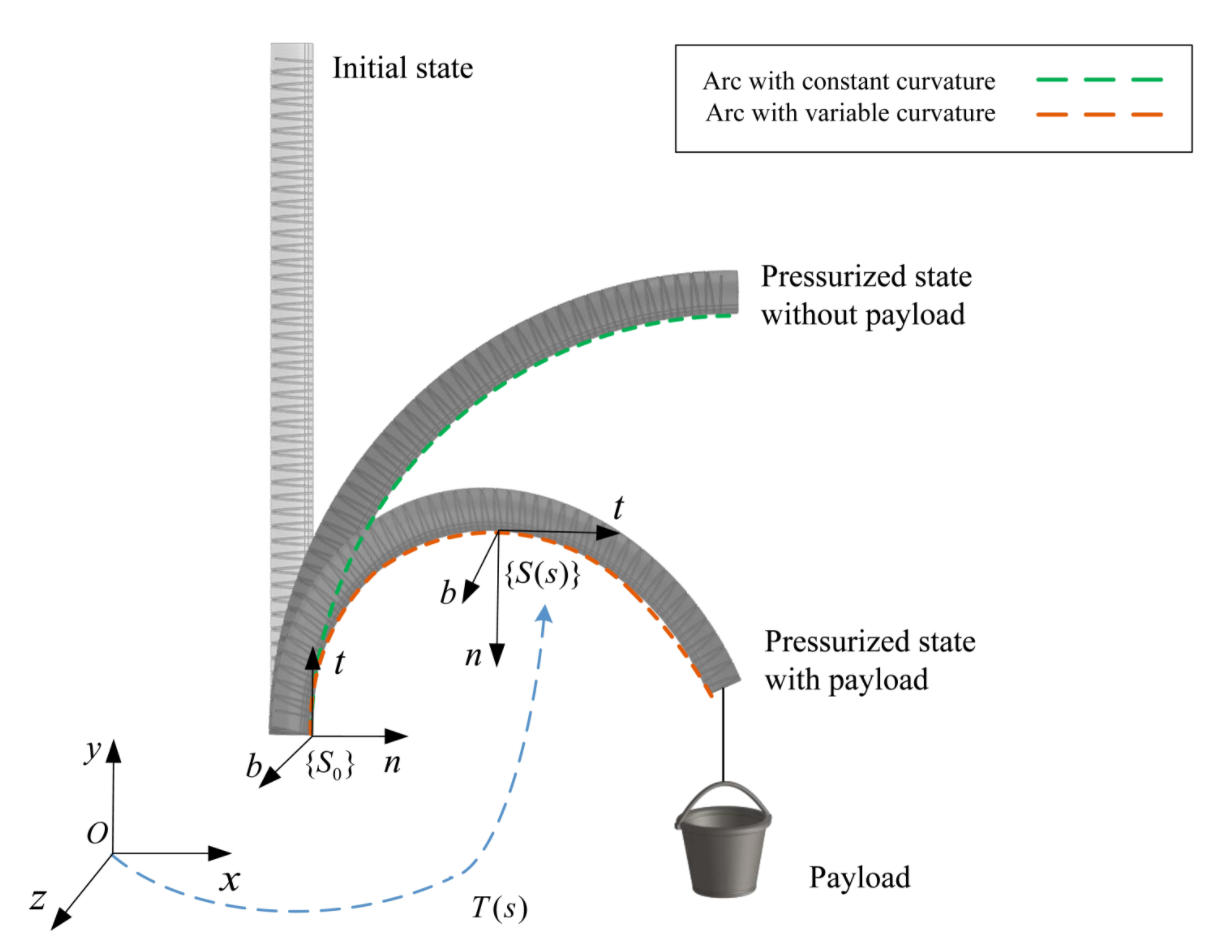 Learning-Based Modeling of Soft Actuators Using Euler Spiral-Inspired CurvatureThe Modeling, Estimation and Control Conference (MECC), Pittsburgh, PA, USA, 2025
Learning-Based Modeling of Soft Actuators Using Euler Spiral-Inspired CurvatureThe Modeling, Estimation and Control Conference (MECC), Pittsburgh, PA, USA, 2025
A MuJoCo-based soft-arm simulation demo exploring sampling-based model-predictive control for tracking dynamically moving targets.
A course project exploring Gaussian Process-based MPC for controlling an Isaac Sim soft-arm model in real time, usinng the FEM simulation capabilities of Isaac Sim.
Akso — a desktop upper-limb rehabilitation training robot for stroke patients.
Developed embedded perception algorithms for a driverless container truck, using machine learning to detect trucks and lane markings on the road in real time.
A course project simulating an autonomous supermarket shelf-stocking robot in Webots, integrating product search, vision-based grasping, shelf-cell selection, GPS-based navigation, and pick-and-place manipulation.
An NXP Cup autonomous vehicle project focused on vision-based line tracking and embedded motion control.
A Micromouse robot project where maze-solving algorithms were first validated in Webots simulation and then deployed on a physical robot, integrating wall sensing, motion control, path planning, and real-world autonomous maze navigation.